程序資料物件 (PDO,Process Data Object) 屬於一種週期性的資料物件,它可用來在每個 EtherCAT 通訊週期(通常為 1 豪秒)於 EtherCAT 主站 (KINGSTAR Runtime) 與 EtherCAT 從站(驅動器與 IO)間進行交換,主站可透過程序資料交換 (Process Data Exchange) 來監控從站裝置。
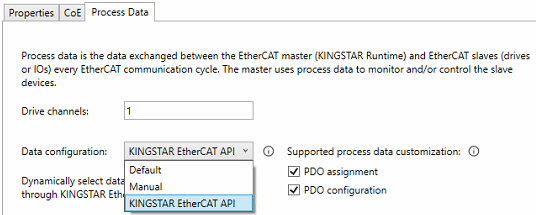
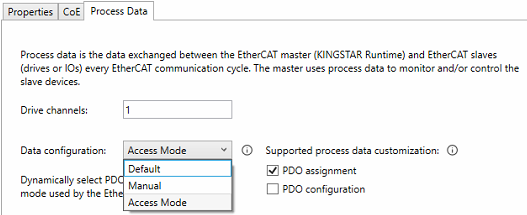
KINGSTAR ESI 匯入工具可供用戶為裝置選擇所需的程序資料配置類型以進行程序資料交換,共有四種類型:預設 (Default)、手動 (Manual)、存取模式 (Access Mode) 及 KINGSTAR EtherCAT API。
• 預設:
- 使用裝置中的 ESI 檔所指定的預設 PDO 組合進行程序資料交換。
- 選擇此配置類型的條件:無
- 設定方式:
- 於資料配置 (Data configuration) 下拉選單選擇預設 (Default),裝置預設的 PDO 及其相關的變數(資料項目)即顯示在下方。此裝置將使用預設 PDO 組合進行程序資料交換。
注意:一般而言,當您選擇了預設類型時就無需編輯變數。但是,若您發現預設變數不正確時,您即可勾選啟用編輯 (Enable editing) 以編輯變數。點擊新增 (Add) 按鈕新增所需的變數;點擊編輯 (Edit) 按鈕以編輯該變數;或點擊刪除 (Delete) 按鈕將該變數移除。
• 手動:
- 手動選擇 PDO 及其包含的變數以進行資料交換,可選的變數取決於 PDO 屬性以及裝置所支援的 PDO 配置 與 PDO 資料項目配置。
- 選擇此配置類型的條件:裝置需支援 PDO 配置 與 PDO 資料項目配置。
- 設定方式:
- 於資料配置 (Data configuration) 下拉選單選擇手動 (Manual),KINGSTAR ESI 匯入工具會自動偵測該裝置可用的 PDO 及其相關的變數(資料項目),並顯示在下方。
- 於輸入 PDO (Input Process Data Objects) 或輸出 PDO (Output Process Data Objects) 欄位裡,將狀態 (Status) 開關開啟或關閉以啟用或停用該 PDO 進行程序資料交換;接著點擊新增 (Add) 按鈕新增所需的變數;點擊編輯 (Edit) 按鈕以編輯該變數;或點擊刪除 (Delete) 按鈕將該變數移除。
注意:若您的裝置支援 PDO 配置,您可選擇 PDO;若您的裝置支援 PDO 資料項目配置,您可編輯變數。更多關於在手動模式設定 PDO 的詳細步驟請見:客製化設備的程序資料。
• 存取模式:
- 允許使用者為不同的 KsAccessMode 選擇不同的 PDO 組合以進行資料交換。
- 選擇此配置類型的條件:
- 裝置需支援 PDO 配置,但不支援 PDO 資料項目配置。
- 裝置需為驅動器(不可為 I/O)。
- 設定方式:
- 於資料配置 (Data configuration) 下拉選單選擇存取模式 (Access Mode),KINGSTAR ESI 匯入工具會自動偵測該裝置可用的 PDO 及其相關的變數(資料項目),並顯示在下方。
- 欲選擇 PDO,於輸入 PDO (Input Process Data Objects) 或輸出 PDO (Output Process Data Objects) 欄位裡,針對各 KsAccessMode (P、V、T、PV、VP、PVT、VPT) 勾選所需的 PDO 以進行程序資料交換。
注意:一般而言,您無需(也不允許)編輯變數。倘若變數有誤,您可勾選啟用編輯 (Enable editing),接著於 PDO 清單上點選一個 PDO,其相關的變數會顯示在下方,您可點擊新增 (Add) 按鈕新增所需的變數;點擊編輯 (Edit) 按鈕以編輯該變數;或點擊刪除 (Delete) 按鈕將該變數移除。
• KINGSTAR EtherCAT API:
- 透過呼叫 KINGSTAR EtherCAT API 自動選擇變數(資料項目)以進行程序資料交換。
- 選擇此配置類型的條件:
- 裝置需支援 PDO 資料項目配置。
- 裝置需為驅動器(不可為 I/O)。
- 設定方式:
- 於資料配置 (Data configuration) 下拉選單選擇 KINGSTAR EtherCAT API,KINGSTAR ESI 匯入工具會自動辨識裝置可用的變數(資料項目)。
- 使用以下 KINGSTAR API 以編輯變數:
- SetAxisAccessMode:您可選擇一種 KsAccessMode,KINGSTAR 將自動配置相應的變數。KINGSTAR Runtime 將根據您選擇的 KsAccessMode 決定是否將目標位置/速度/扭矩及實際位置/速度/扭矩變數加入程序資料交換,請注意,僅當設備支援所選 KsAccessMode 所需的變數時,關聯的 McControlMode 才可被使用。
- 軸變數:除了 KINGSTAR 為各 KsAccessMode 自動配置相應的變數外,您亦可使用軸變數 API 將所需的變數加入程序資料交換。注意:請確認您的裝置有支援欲加入的變數。
針對 .NET Class,請參閱 ISubsystem 屬性(如 ActualCurrent;ActualVelocity)。
注意:顯示字體為黑色的變數表示驅動器支援該變數;顯示字體為灰色的變數表示驅動器不支援該變數,即使使用相關的 KINGSTAR API 將該變數加入,該變數也無法進行程序資料交換。
注意:您亦可使用 KINGSTAR 設定工具選擇 KsAccessMode 及軸變數,請參閱 連接設定 > 軸設定 (Axis Settings)。
KINGSTAR 支援的程序資料變數說明
KINGSTAR ESI 匯入工具會自動偵測裝置所支援的程序資料變數,並將 KINGSTAR 所支援的程序資料變數顯示在 輸入資料 (Input Data) 與 輸出資料 (Output Data) 欄位中。
輸入資料(變數由從站傳送至主站):

Status word:驅動器的狀態。狀態有 "未準備好開啟 (not ready to switch on)"、"開啟已停用 (switch on disabled)"、"開啟就緒 (ready to switch on)"、"已開啟 (switched on)"、"操作啟用 (operation enabled)"、"快速停止起啟用中 (quick stop active)"﹑"錯誤反應用中 (fault reaction active)" 或 "錯誤 (fault)"。
Actual position:實際位置。
Actual velocity:實際速度。
Actual torque:實際扭矩。
Actual current:實際電流。
MOP display:操作模式顯示變數的值,操作模式可為 CSP (Cyclic Synchronous Position)、CSV (Cyclic Synchronous Velocity)、CST (Cyclic Synchronous Torque) 等等。
Drive digital inputs:驅動器的數位輸入。
Touch probe:驅動器的位置抓取針狀態。
Secondary encode:如果機器上有兩個編碼器,從第二個編碼器取得位置。
Following error:跟隨誤差。
Probe positive edge:位置抓取針上升邊緣後鎖存的位置值。
Probe negative edge:位置抓取針下降邊緣後鎖存的位置值。
Custom input 1:使用者定義的物件,此物件必須存在於裝置物件字典。
Custom input 2:使用者定義的物件,此物件必須存在於裝置物件字典。
輸出資料(變數由主站傳送至從站):
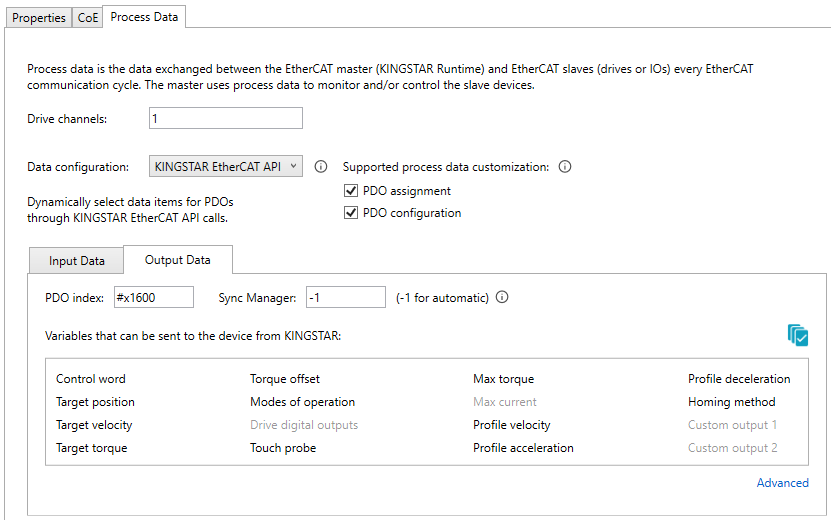
Control word:此物件用來設定驅動器的模式,模式可透過 Status word 讀取。
Target position:命令位置。
Target velocity:命令速度。
Target torque:命令扭矩。
Torque offset:扭矩位移,在扭矩模式使用。
Modes of operation:此物件用來設定驅動器的操作模式,可由 MOP 顯示讀取。
Drive digital outputs:驅動器數位輸出。
Touch probe:傳送位置抓取命令。
Max torque:最大扭矩。
Max current:最大電流。
Profile velocity:曲線速度。
Profile acceleration:曲線加速度。
Profile deceleration:曲線減速度。
Homing method:原點賦歸方法。
Custom output 1:使用者定義的物件,此物件必須存在於裝置物件字典。
Custom output 2:使用者定義的物件,此物件必須存在於裝置物件字典。
功能/API 與變數關係表
下表列出各功能 / API 需使用到的變數,供您參考。
| 功能 / API | 所需程序資料變數 |
|---|---|
|
Target position |
|
|
Target velocity |
|
|
Target torque Actual torque |
|
|
Control mode switching while powered on, |
MOP display Modes of operation |
|
Touch probe (input: status) Touch probe (output: control) Probe positive edge Probe negative edge |
|
|
Drive digital inputs |
|
|
Drive digital outputs |
|
|
Actual current |
|
|
Actual torque |
|
|
Actual velocity |
|
|
Second Position |
|
|
Following error |
|
| Torque offset | |
|
Max torque |
|
|
Max current |
|
|
Profile velocity |
|
|
Profile acceleration |
|
|
Profile deceleration |
|
專有名詞說明
-
程序資料交換 (Process Data Exchange):
每個 EtherCAT 通訊週期(通常每個週期為 1 毫秒)於 EtherCAT 主站 (KINGSTAR Runtime) 與 EtherCAT 從站(驅動器或 IO)間進行程序資料交換,包括輸入資料(資料由從站傳送至主站)和輸出資料(資料由主站傳送至從站)。
-
PDO (Process Data Object):
程序資料物件。每個程序資料物件都含有一組資料項目(PDO entry)可供選擇,以進行程序資料交換,某些裝置會使用固定的 PDO(無法修改 PDO 中的資料項目)或強制某些 PDO 必須進行程序資料交換。
-
裝置所支援的 PDO,可供使用者選擇以進行程序資料交換。
-
PDO 資料項目配置 (PDO Configuration):
PDO 中的資料項目,可供使用者選擇以進行配置。
-
KINGSTAR EtherCAT API:
KINGSTAR 提供許多 EtherCAT 相關的 API,其中會影響到可選的程序資料項目的 API 為 軸變數。針對 .NET Class,請參閱 ISubsystem 屬性(如 ActualCurrent, ActualVelocity)。
參見